Применение камер ВИДЕОСКАН: стереоскопическая система технического зрения
Научно-исследовательский центр распознавания образов - ЗАО "НИЦРО" - работает в области технических систем автоматического распознавания, и в частности, распознавания изображений в реальном времени.
Одна из интересных разработок - Стереоскопическая Система Технического Зрения - ССТЗ, "глазами" которой являются цифровые камеры "ВИДЕОСКАН", работающие в синхронном режиме ввода данных.

Рис.1
Телевизионная стереосистема на устройстве позиционирования.
Телевизионная стереосистема на устройстве позиционирования.
Стереосистема ССТЗ может включать две (или более) цифровые камеры "ВИДЕОСКАН-415" с матрицами размерностью 782х582, прогрессивной разверткой и работающими синхронно на частоте 25 Гц.
Функциональный состав ССТЗ:
- ввод изображения;
- запись их на жесткий диск;
- обработка данных "на лету" (wavelet-анализ);
- отображение в графической форме на монитор;
- оперативная обработка команд оператора
обуславливает требование значительных вычислительных ресурсов от используемой вычислительной техники. Современные ПЭВМ позволяют реализовать алгоритмы обработки и классификации изображений в реальном времени, однако, в настоящем случае производительности одной ЭВМ не хватает для выполнения этих задач из-за громадного потока данных.
Реализация ССТЗ была сделана на основе распределенной сети, состоящей из трех ЭВМ (Рис.2), обмен данных между которыми реализован на основе протокола TCP/IP.
Рис.2
Трехмашинная архитектура ТЗС
Первые две ЭВМ - технологические - вводят изображение с видеокамер и осуществляют предварительную обработку каждого кадра. Головная ЭВМ – осуществляет:
Рис.2
Трехмашинная архитектура ТЗС
Первые две ЭВМ - технологические - вводят изображение с видеокамер и осуществляют предварительную обработку каждого кадра. Головная ЭВМ – осуществляет:
- сбор информации с камер/компьютеров;
- отождествление и распознавание объектов;
- вывод стереоизображений на экран или шлем виртуальной реальности;
- сохранение изображения на жесткий диск;
- взаимодействие с контроллерами устройства позиционирования и оператором.
Отметим преимущества такой архитектуры:
- Утраивается вычислительная мощность, а цена увеличивается на 30-45%.
- Могут быть использованы разные операционные системы, например DOS и LINUX (на нижнем уровне) и Windows – на верхнем.
- При модернизации программного обеспечения на технологических компьютерах предварительной обработки не меняется ничего, кроме драйвера сетевой карты.
- Упрощается коллективная разработка программ, так как для разных задач легко использовать разные языки и системы программирования.
- Технологические компьютеры нижнего уровня подключены к Ethernet по протоколу TCP/IP, что облегчает разработки систем различной конфигурации, в том числе WEB приложений.
В процессе работы получаемые камерами изображения фрагментируются, обнаруживаются движущиеся объекты, благодаря стерео режиму определяется их действительный размер и вектора скоростей, осуществляется их предварительное распознавание (человек, автомобиль, мелкое животное) и сопровождение.
Примененные алгоритмы распознавания работают при низком соотношении сигнал/шум 3дБ при атмосферных осадках. Помимо всего прочего, ССТЗ позволяет записывать без уплотнения видеопоток 2х782х582 25 к/сек.
Существует резерв повышения производительности: в состав системы можно ввести четвертый компьютер, подключив его к головному компьютеру для взаимодействия с оператором.
Существует резерв повышения производительности: в состав системы можно ввести четвертый компьютер, подключив его к головному компьютеру для взаимодействия с оператором.
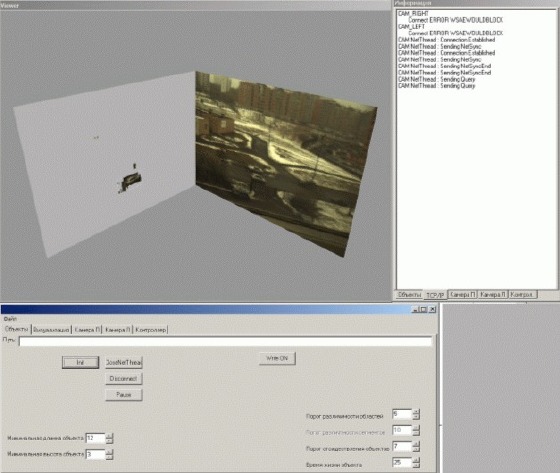
Рис. 3
Интерфейс программы обнаружения и распознавания.
Интерфейс программы обнаружения и распознавания.
Благодаря стереоскопическим свойствам и специальным алгоритмам ССТЗ позволяет обнаруживать, сопровождать и распознавать объекты в плохих метеоусловиях и при помехах (мелкие животные и пр.).
ССТЗ прошла натурные испытания и в настоящее время используется для проведения НИР в задачах обнаружения, распознавания и автовождения различных объектов.